Κλασσική Σχετικότης

Φυσικοί Γης
Νόμοι Φυσικής
Νόμοι Φυσικής
Θεωρίες Φυσικής
Πειράματα Φυσικής
Παράδοξα Φυσικής
Προβλήματα Φυσικής
Σχετική Κίνηση
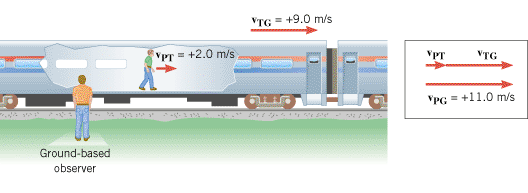
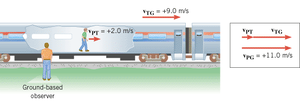
The velocity of the passenger
relative to the ground-based observer is vPG.
It is the vector sum of the velocity vPT
of the passenger relative to the train and
the velocity vTG of the train relative to
the ground:vPG = vPT + vTG.
- Ο βασικός τύπος της Σχετικότητας που χρησιμοποιείται στην Κλασσική Φυσική.
Ετυμολογία[]
Η ονομασία "Κλασσική" σχετίζεται ετυμολογικά με την λέξη "κλάση".
Εισαγωγή[]
Στηρίζεται στο δόγμα της ανυπαρξίας "απόλυτου κριτηρίου ακινησίας" οπότε δεν υπάρχει δυνατότητα να αποφανθεί ένας Παρατηρητής αν ένα σώμα είναι ακίνητο ή κινείται.
Σύμφωνα με αυτό η Κινητική Κατάσταση ενός σώματος μπορεί να καθορισθεί μόνον σχετικά δηλ. με αναφορά σε ένα ένα άλλο σώμα που αυθαίρετα θα θεωρηθεί "ακίνητο".
Ανάλυση[]
Η Κλασσική Σχετικότητα στηρίζεται στην ισοδυναμία (equivalence) όλων των αδρανειακών συστημάτων αναφοράς (inertial reference frames).
Βασική σημασία έχουν οι επιπρόσθετες θεωρήσεις του απόλυτου Χώρου (absolute space) και του απόλυτου Χρόνου (absolute time).
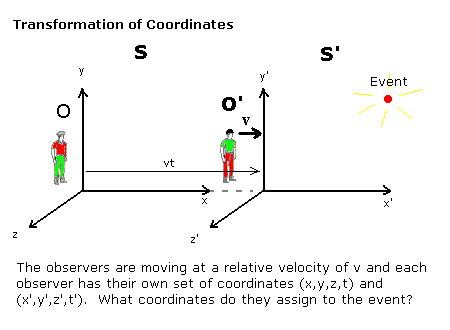
Με βάση τα ανωτέρω οι συντεταγμένες (coordinates) της θέσης ενός γεγονότος (event) (δηλ. ενός "σημείου" (point) στον Χώρο και στον Χρόνο)) περιγράφεται από δύο αδρανειακά συστήματα αναφοράς (inertial reference frames) που σχετίζονται μεταξύ τους με έναν Γαλιλαϊκό Μετασχηματισμό (Galilean transformation).


- όπου
- and είναι οι μετατοπίσεις από την αρχή του Χώρου και του Χρόνου,
- είναι η σχετική ταχύτητα (relative velocity) μεταξύ των δύο συστημάτων (inertial reference frames).



Ας σημειωθεί ότι υπό έναν Γαλιλαϊκό Μετασχηματισμό (Galilean transformation):
- the time between two events () is the same for all inertial reference frames and
- the distance between two simultaneous events (or, equivalently, the length of any object, ) is also the same.


Φυσικά Μεγέθη Κίνησης[]


Αδρανειακό Σύστημα Αναφοράς (Ορατό σε μεγέθυνση.
Τα δύο βασικά αξιώματα της Κλασσικής Σχετικότητας είναι:
- There exists an Απόλυτος Χώρος (absolute space), in which Newton's laws are true. An inertial frame is a reference frame in relative uniform motion to absolute space.
- All inertial frames share a Παγκόσμιος Χρόνος (universal time).
Consider two inertial frames S and S' .
A physical event in S will have position coordinates r = (x, y, z) and time t; similarly for S' .
By the second axiom above, one can synchronize the clock in the two frames and assume t = t' .
Suppose S' is in relative uniform motion to S with velocity v.
Consider a point object whose position is given by r = r(t) in S.
We see that

The velocity of the particle is given by the time derivative of the position:

Another differentiation gives the acceleration in the two frames:

Υποσημειώσεις[]
Εσωτερική Αρθρογραφία[]
- Κλασσική Μηχανική
- Γαλιλαϊκός Μετασχηματισμός
- Σχετική Κίνηση
- Προκλασσική Σχετικότητα
- Αριστοτέλεια Μηχανική
- Ειδική Σχετικότητα
- Γενική Σχετικότητα
Βιβλιογραφία[]
Ιστογραφία[]
|
Αν και θα βρείτε εξακριβωμένες πληροφορίες "Οι πληροφορίες αυτές μπορεί πρόσφατα Πρέπει να λάβετε υπ' όψη ότι Επίσης, |
- Μην κάνετε χρήση του περιεχομένου της παρούσας εγκυκλοπαίδειας
αν διαφωνείτε με όσα αναγράφονται σε αυτήν
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Όχι, στις διαφημίσεις που περιέχουν απαράδεκτο περιεχόμενο (άσεμνες εικόνες, ροζ αγγελίες κλπ.)